Deadlocks
In a multi-programming environment, several threads may compete for a finite number of resources. A thread requests resources; if the resources are not available at that time, the thread enters a waiting state. Sometimes, a waiting thread can never again change state because the resources it has requested are heldd by other waiting threads. This is what is referred to as a deadlock.
A thread must request a resource before using it and must release the resource after using it. A thread may request as many resources as it requires to carry out its designated task. The number of resources requested may not exceed the total number of resources available in the system.
Under the normal mode of operation, a thread may utilise a resource in only the following sequence:
- Request: The thread requests the resource. If the request cannot be granted immediately, then the requesting thread must wait until it can acquire the resource.
- Use: The thread can operate on the resource.
- Release: The thread releases the resource.
The request and release of resources may be system calls such as:
request()andrelease()of a device.open()andclose()of a file.allocate()andfree()memory system calls.
Request and release can alos be accomplished through the wait()a nd signal()
operations on semaphores and through acquire() and release() of a mutex lock.
For each use of a kernel-managed resource by a thread, the operating system checks to make sure that the thread has requested and has been allocated the resource. A system table records whether each resource is free or allocated. For each resource that is allocated, the table also records the thread to which it is allocated. If a thread requests a resource that is currently allocated to another thread, it can be added to a queue of threads waiting for this resource.
// thread_one runs in this function
void *do_work_one(void *param) {
pthread_mutex_lock(&first_mutex);
pthread_mutex_lock(&second_mutex);
// Do some work
pthread_mutex_unlock(&second_mutex);
pthread_mutex_unlock(&first_mutex);
pthread_exit(0);
}
// thread_two runs in this function
void *do_work_two(void *param) {
pthread_mutex_lock(&second_mutex);
pthread_mutex_lock(&first_mutex);
// Do some work
pthread_mutex_unlock(&first_mutex);
pthread_mutex_unlock(&second_mutex);
pthread_exit(0);
}
Figure: Deadlock example.
Livelock
Livelock is another form of liveness failure. It is similar to deadlock; both prevent two or more threads from proceeding, but the threads are unable to processed for different reasons. Whereas deadlock occurs when every thread in a set is blocked waiting for an event that can be caused only by another thread in the set, livelock occurs when a thread continuously attempts an action that fails.
Livelock typically occurs when threads retry failing operations at the same time. It thus can generally be avoided by having each thread retry the failing operation at random times.
// thread_one runs in this function
void *do_work_one(void *param) {
int done = 0;
while (!done) {
pthread_mutex_lock(&first_mutex);
if (pthread_mutex_trylock(&second_mutex)) {
// Do some work
pthread_mutex_unlock(&second_mutex);
pthread_mutex_unlock(&first_mutex);
done = 1;
} else {
pthread_mutex_unlock(&first_mutex);
}
}
pthread_exit(0);
}
// thread_two runs in this function
void *do_work_two(void *param) {
int done = 0;
while (!done) {
pthread_mutex_lock(&second_mutex);
if (pthread_mutex_trylock(&first_mutex)) {
// Do some work
pthread_mutex_unlock(&first_mutex);
pthread_mutex_unlock(&second_mutex);
done = 1;
} else {
pthread_mutex_unlock(&second_mutex);
}
}
pthread_exit(0);
}
Figure: Livelock example.
Deadlock Charaterisation
A deadlock situation can arise if the following four conditions hold simultaneously in the system:
- Mutual exclusion: At least one resource must be held in a non-sharable mode; that is, only one thread at a time can use the resource. If another thread requests that resource, the requesting thread must be delayed until the resource has been released.
- Hold and wait: A thread must be holding at least one resource and waiting to acquire additional resources that are currently being held by other threads.
- No preemption: Resources cannot be preempted; that is, a resource can be released only voluntarily by the thread holding it, after that thread has completed its task.
- Circular wait: A set \(\{T_0, T_1, \dots, T_n\}\) of waiting threads must exist such that \(T_0\) is waiting for a resource held by \(T_1\), \(T_1\) is waiting for a resource held by \(T_2, \dots, T_{n-1}\) is waiting for a resource held by \(T_n\), and \(T_n\) is waiting for a resource held by \(T_0\).
Resource-Allocation Graph
Deadlocks can be described more precisely in terms of a directed graph called a system resource-allocation graph. The set of vertices \(V\) is partitioned into two different types of nodes:
- \(T = \{T_0, T_1, \dots, T_n\}\), the set consisting of all the active threads in the system.
- \(R = \{R_0, R_1, \dots, R_m\}\), the set consisting of all resource types in the system.
A directed edge from thread \(T_i\) to resource type \(R_j\) is denoted \(T_i \rightarrow R_j\) and is called a request edge; it signifies that thread \(T_i\) has requested an instance of resource type \(R_j\) and is currently waiting for that resource. A directed edge from resource type \(R_j\) to thread \(T_i\) is denoted \(R_j \rightarrow T_i\) and is called an assignment edge; it signifies that an instance of resource type \(R_j\) has been allocated to thread \(T_i\).
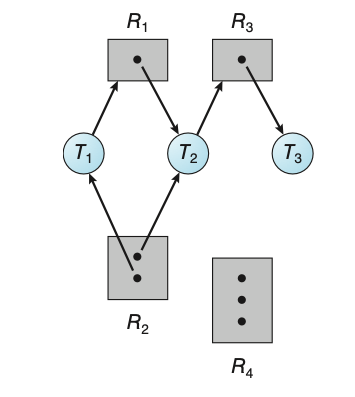
Pictorially, each thread \(T_i\) is represented as a circle and each resource type \(R_j\) as a rectangle. An instance of a resource is represented by a dot within the rectangle. For example, the below graph depicts the following situation:
- The sets \(T\), \(R\), and \(E\):
- \(T = \{T_1, T_2, T_3\}\)
- \(R = \{R_1, R_2, R_3, R_4\}\)
- \(E = \{T_1 \rightarrow R_1, T_2 \rightarrow R_3, R_1 \rightarrow T_2, R_2 \rightarrow T_2, R_2 \rightarrow T_1, R_3 \rightarrow T_3\}\)
- Resource instances:
- One instance of resource type \(R_1\)
- Two instances of resource type \(R_2\)
- One instance of resource type \(R_3\)
- Three instances of resource type \(R_4\)
- Thread states:
- Thread \(T_1\) is holding an instance of resource type \(R_2\) and is waiting for an instance of resource type \(R_1\).
- Thread \(T_2\) is holding an instance of resource type \(R_1\) and an instance of \(R_2\) and is waiting for an instance of resource type \(R_3\).
- Thread \(T_3\) is holding an instance of resource type \(R_3\).
Given the definition of a resource-allocation graph, it can be shown that, if the graph contains no cycles, then no thread in the system is deadlocked. If the graph does contain a cycle, then a deadlock may exist.
- If each resource type has exactly one instance, then a cycle implies that a deadlock has occurred.
- If the cycle involves only a set of resource types, each of which has only a single instance, then a deadlock has occurred. In this case, a cycle in the graph is both a necessary and sufficient condition for the existence of deadlock.
- If each resource type has several instances, then a cycle does not necessarily imply that a deadlock has occurred. In this case, a cycle in the graph is a necessary but not a sufficient condition for the existence of deadlock.
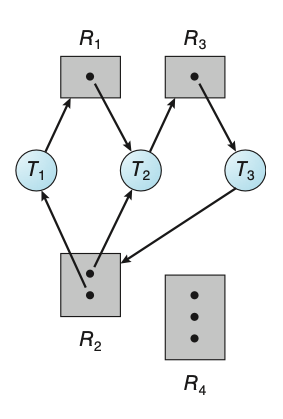
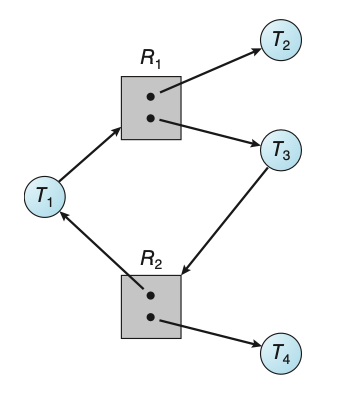
If a resource-allocation graph does not have a cycle, then the system is not in a deadlocked state. If there is a cycle, then the system may or may not be in a deadlocked state.
Methods for Handling Deadlocks
A deadlock problem can generally be dealt with in one of three ways:
- We can ignore the problem altogether and pretend that deadlocks never occur in the system.
- We can use a protocol to prevent or avoid deadlocks, ensuring that the system will never enter a deadlocked state.
- We can allow the system to enter a deadlocked state, detect it, and recover.
To ensure that deadlocks never occur, the system can use either a deadlock-prevention or a deadlock-avoidance scheme. Deadlock prevention provides a set of methods to ensure that at least one of the necessary conditions cannot hold. These methods prevent deadlocks by constraining how requests for resources can be made. Deadlock avoidance requires that the operation system be given additional information in advance concerning which resources a thread will request and use during its lifetime. With this additional information, the operating system can decide for each request whether or not the thread should wait.
Deadlock Prevention
Mutual Exclusion
The mutual-exclusion condition must hold. That is, at least one resource must be nonsharable. Sharable resources do not require mutually exclusive access and thus cannot be involved in a deadlock. Read-only files are a good example of a sharable resource. If several threads attempt to open a read-only file at the same time, they can be granted simultaneous access to the file. A thread never needs to wait for a sharable resource. In general, however, we cannot prevent deadlocks by denying the mutual-exclusion condition, because some resources are intrinsically nonsharable. For example, a mutex lock cannot be simultaneously shared by several threads.
Hold and Wait
To ensure that the hold-and-wait condition never occurs in the system, we must guarantee that, whenever a thread requests a resource, it does not hold any other resources.
- One protocol that can be used requires each thread to request and be allocated all its resources before it begins execution. This is impractical for most applications due to the dynamic nature of requesting resources.
- An alternative protocol allows a thread to request resources only when it has none. A thead may request some resources and use them. Before it can request additional resources, it must release all the resources that it is currently allocated.
Both these protocols have two main disadvantages:
- Resource utilisation may be low since resources may be allocated but unused for a long period.
- Starvation is possible. A thread that needs several popular resources may have to wait indefinitely because at least one of the resources that it needs is always allocated to some other thread.
No Preemption
The third necessary condition for deadlocks is that there be no preemption of resources that have already been allocated. To ensure that this condition does not hold, we can use the following protocol. If a thread is holding some resources and requests another resource that cannot be immediately allocated to it (that is, the thread must wait), then all resources the thread is currently holding are preempted. In other words, these resources are implicitly released. The preempted resources are added to the list of resources for which the thread is waiting. The thread will be restarted only when it can regain its old resources, as well as the new ones that it is requesting.
Alternatively, if a thread requests some resources, we first check whether they are available. If they are, we allocate them. If they are not, we check whether they are allocated to some other thread that is waiting for additional resources. If so, we preempt the desired resources from the waiting thread and allocate them to the requesting thread. If the resources are neither available nor held by a waiting thread, the requesting thread must wait. While it is waiting, some of its resources may be preempted, but only if another thread requests them. A thread can be restarted only when it is allocated the new resources it is requesting and recovers any resources that were preempted while it was waiting.
Circular Wait
One way to ensure that this condition never holds is to impose a total ordering of all resource types and to require that each thread requests resources in an increasing oredr of enumeration.
void transaction(Account from, Account to, double amount) {
mutex lock1;
mutex lock2;
lock1 = get_lock(from);
lock2 = get_lock(to);
acquire(lock1);
acquire(lock2);
withdraw(from, amount);
deposit(to, amount);
release(lock2);
release(lock1);
}
Deadlock Avoidance
An alternative method for avoiding deadlocks is to require additional information about how resources are to be requested. The various algorithms that use this approach differ in the amount and type of information required. The simplest and most useful model requires that each thread declare the maximum number of resources of each type that it may need. Given this prior information, it is possible to construct an algorithm that ensures that the system will never enter a deadlocked state.
Safe State
A system is in a safe state only if there exists a safe sequence. In other words, a state is safe if the system can allocate resources to each thread in some order and still avoid a deadlock. A sequence of threads \(<T_1, T_2, \dots, T_n>\) is a safe sequence for the current allocation if, for each \(T_i\), the resource requests that \(T_i\) can still make can be satisfied by the current available resources plus the resources held by all \(T_j\), with \(j < i\). If no such sequence exists, then the system state is said to be unsafe.
A safe state is not a deadlocked state. Conversely, a deadlocked state is an unsafe state. Not all unsafe states are deadlocks however. As long as the state is safe, the operating system can avoid unsafe states.
Resource-Allocation-Graph Algorithm
TODO:
Banker's Algorithm
TODO:
Safety Algorithm
TODO:
Resource-Request Algorithm
TODO:
Deadlock Detection
If a system does not employ either a deadlock-prevention or a deadlock-avoidance algorithm, then a deadlock situation may occur. In this environment, the system may provide:
- An algorithm that examines the state ofo the system to determine whether a deadlock has occured.
- An algorithm to recover from the deadlock.
Single Instance of Each Resource Type
If all resources have only a single instance, then we can define a deadlock-detection algorithm that uses a variant of the resource-allocation graph by a wait-for graph.
This graph is obtained from the resource-allocation graph by removing the resource nodes and collapsing the appropriate edges. More precisely, an edges from \(T_i\) to \(T_j\) in a wait-for graph implies that thread \(T_i\) is waiting for thread \(T_j\) to release a resource that \(T_i\) needs. An edge \(T_i \rightarrow T_j\) exists in a wait-for graph if and only if the corresponding resource-allocation graph contains two edges \(T_i \rightarrow R_q\) and \(R_q \rightarrow T_i\) for some resource \(R_q\).
As before, a deadlock exists in the system if and only if the wait-for graph contains a cycle. To detect deadlocks, the system needs to maintain the wait-for graph and periodically invoke an algorithm that searches for a cycle in the graph. An algorithm to detect a cycle in a graph requires \(O(n^2)\) operations, where \(n\) is the number of vertices in the graph.
Several Instances of a Resource Type
The wait-for graph scheme is not applicable to a resource-allocation system with multiple instances of each resource type. This algorithm employs several time-varying data structures that are similar to those used in the bankers algorithm:
- Available: A vector of length \(m\) indicates the number of available resources of each type.
- Allocation: An \(n \times m\) matrix defines the number of resources of each type currently allocated to each thread.
- Request: An \(n \times m\) matrix indicates the current request of each thread. If \(Request[i][j]\) equals \(k\), then thread \(T_i\) is requesting \(k\) more instances of resource type \(R_j\).
- Let \(Work\) and \(Finish\) be vectors of length \(m\) and \(n\), respectively. Initialise \(Work = Available\). For \(i = 0, 1, \dots, n-1\), if \(Allocation_i \ne 0\), then \(Finish[i] = false\). Otherwise, \(Finish[i] = true\).
- Find an index \(i\) such that both,
a: \(Finish[i] == false\)
b: \(Request_i \le Work\)
If no such \(i\) exists, go to step 4. - \(Work = Work + Allocation_i\)
\(Finish[i] == true\)
Go to step 2 - If \(Finish[i] == false\) for some \(i, 0 \le i \le n\), then the system is in a deadlocked state. Moreover, if \(Finish[i] == false\), then thread \(T_i\) is deadlocked.
This algorithm requires an order of \(m \times n^2\) operations to detect whether the system is in a deadlocked state.
Detection-Algorithm Usage
When should we invoke the detection algorithm? The answer depends on two factors:
- How often is a deadlock likely to occur?
- How many threads will be affected by deadlock when it happens?
If the detection algorithm is invoked at arbitrary points in time, the resource graph may contain many cycles. In this case, we generally cannot tell which of the many deadlocked threads "caused" the deadlock.
Recovery from Deadlock
When a detection algorithm determines that a deadlock exists, several alternatives are available. One possibility is to inform the operator that a deadlock has occurred and to let the operator deal with the deadlock manually. Another possibility is to let the system recover from the deadlock automatically.
There are two options for breaking a deadlock:
- Abort one or more threads to break the circular wait.
- Preempt some resources from one or more of the deadlocked threads.
Process and Thread Termination
To eliminate deadlocks by aborting a process or thread, two methods can be used. In both methods, the system reclaims all resources allocated to the terminated processes.
- Abort all deadlocked processes: This method will break the deadlock cycle, but at great expense. The deadlocked processes may have computed for a long time, and the result of these partial computations must be discarded and probably will have to be re-computed later.
- Abort one process at a time until the deadlock cycle is eliminated: This method incurs considerable overhead, since after each process is aborted, a deadlock-detection algorithm must be invoked.
Aborting a process may not be easy. If the process was in the midst of updating a file, terminating it may leave that file in an incorrect state. If the partial termination method is used, then we must determine which deadlocked process (or processes) should be terminated. This determination is a policy decision, similar to CPU-scheduling decisions. We should abort those processes whose termination will incur the minimum cost. Many factors may affect which process is chosen, such as:
- What the priority of the process is.
- How long the process has computed and how much longer the process will compute before completing its designated task.
- How many and what types of resources the process has used.
- How many more resources the process needs in order to complete.
- How many processes will need to be terminated.
Resource Preemption
To eliminate deadlocks using resource preemption, we successively preempt some resources from processes and give these resources to other processes until the deadlock cycle is broken. If preemption is required to deal with deadlocks, then three issues need to be addressed:
- Selecting a victim: Which resources and which processes are to preempted? As in process termination, we must determine the order of preemption to minimise cost.
- Rollback: If we preempt a resource from a process, what should be done with that process? Clearly, it cannot continue with its normal excecution; it is missing some needed resource. We must roll back the process to some safe state and restart it from that state. Since, in general, it is difficult to determine what a safe states is, the simplest solution is a total rollback: abort the process and then restart it.
- Starvation: How do we ensure that starvation will not occur? That is, how can we guarantee that resources will not always be preempted from the same process. In a system where victim selection is based prirmarily on cost factors, it may happen that the same process is always picked as a victim. As a result, this process never completes its designated task.